使用PX4搭建并运行第一个应用程序
本文主要说明如何搭建并运行你的第一个板载应用程序。
Firmware/src/examples/px4_simple_app文件夹下默认已经有一个完整的例程,如果遇到了问题可以作为参考。如果需要自己重新编写的话请重命名px4_simple_app文件夹或删除px4_simple_app文件夹。
1.编写px4_simple_app应用程序文件
我们创建一个很小的应用程序,只是打印出来Hello Sky!。
这包括一个C 文件和一个cmake 定义文件(它告诉工具链如何构建应用程序)。
- 新建如下文件夹: Firmware/src/examples/px4_simple_app。
- 在该目录中新建一个名为 px4_simple_app.c 的 C 文件:
1 | /** |
main函数必须命名为 “应用程序名称” + “_” + “main” 的形式并从模块中导出 __EXPORT。
这里
__EXPORT是一个宏定义,其定义在Firmware/src/modules/systemlib/visibility.h中
2
3
4
5
6
7
8
9
__attribute__()函数用于设置动态链接库中函数的可见性,将变量或函数设置为default,则该符号可在其他动态链接库中可见;将变量或函数设置为hidden,则该符号仅在本动态链接库中可见,在其他库中不可见。编写大型程序时默认隐藏,针对特定变量和函数,在代码中使用
__attribute__((visibility("default")))令该符号外部可见,这种方法可有效避免动态链接库之间的符号冲突。(近似于类中的访问权限:public, private, protected)
PX4_INFO相当于输出到PX4 shell的printf(包含在Firmware/src/platforms/px4_log.h中)。 这里有不同的日志级别:PX4_INFO、PX4_WARN、PX4_ERR、PX4_DEBUG。 警告和错误会额外添加到 ULog 并显示在 Flight Review 中。
- 创建并打开一个名为CMakeLists.txt的cmake定义文件:
1 | px4_add_module( |
px4_add_module() 方法根据模块描述生成静态库。
-
MODULE块是模块的唯一固件名称(按照惯例,模块名称的前缀是src之后的父路径) -
MAIN块列出了模块的入口点,它将命令注册到 NuttX,以便可以从 PX4 shell 或 SITL 控制台调用它。
- 创建Kconfig文件,定义该应用程序的名称:
1 | menuconfig EXAMPLES_PX4_SIMPLE_APP |
PX4 Kconfig符号命名约定:
按照惯例,模块/驱动程序的符号是根据模块文件夹路径命名的。
例如,Firmware/src/drivers/ADC/board_ADC处ADC驱动程序的符号必须命名为drivers_ADC_board_ADC。
应用程序的编写至此完成。
2.编译并烧录px4_simple_app应用程序到飞控固件中
为了运行它,首先需要确保它是作为PX4的一部分构建的。 应用程序被将依据目标的适当板级cmake文件添加到编译/固件中。
首先需要在px4board文件中添加px4_simple_app,位置在Firmware/boards/px4/fmu-v2/default.px4board,在空白行添加以下语句。
1 | CONFIG_EXAMPLES_PX4_SIMPLE_APP=y |

保存之后退出。
打开命令行终端Terminal,使用ls、cd命令进入Firmware文件夹中。
在Firmware文件夹中输入命令即可对固件进行编译。
1 | make px4_fmu-v2_default |

等待进度到100%即可完成固件编译。

将编译好的固件下载到无人机,需要输入命令。
1 | make px4_fmu-v2_default upload |

这里提示需要连接无人机的数据线,等待进度条读完即可完成烧录固件。

3.在QGC地面站MavlinkConsole终端运行px4_simple_app应用程序
打开QGC地面站,进入MavlinkConsole终端。

在终端中输入help命令调出所有进程,这时会发现px4_simple_app已经在列表中。
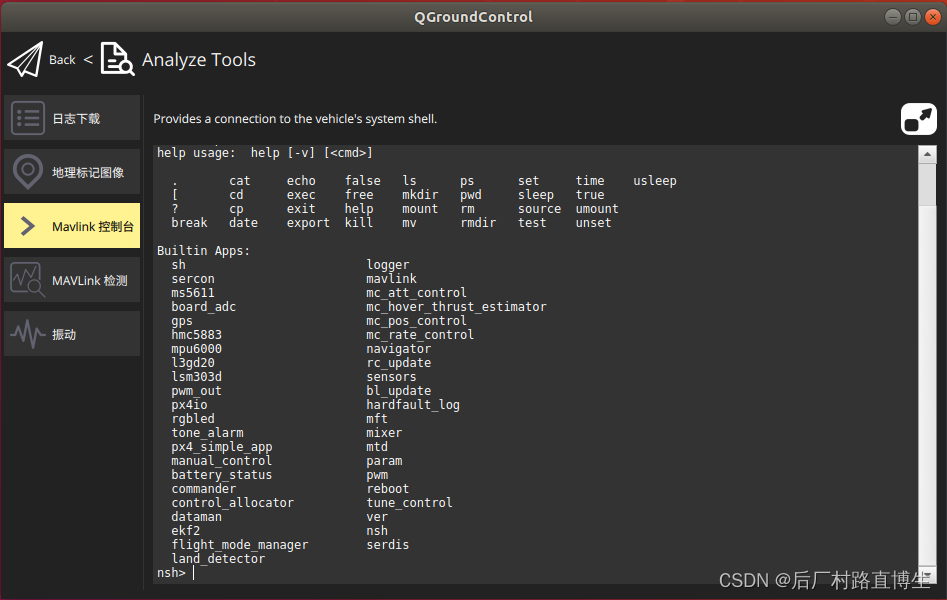
在终端中输入px4_simple_app start命令调用该进程。

运行后会输出语句INFO [px4_simple_app] Hello Sky!,说明程序运行成功。

